I am an undergraduate student at North Carolina State University, majoring in Computer Science with a minor in Mathematics. I currently work as an undergraduate research assistant in the Hier Lab, where I research learning based approaches to legged robot locomotion.
My academic interest include Robot Learning, Agile Loco-Manipulation, and Human-Centered Robotics. I aim to develop robots to safely assist humans with challenging, dangerous, or otherwise inaccessible tasks. Besides robotics, I am also interested in Software Systems and Programming Languages.
Outside academics, I like to cook, sculpt, build scale models, go to the gym, and read. I play the bass guitar and love listening to a wide variety of music. I also play a lot of games. Some of my favorites include Elden Ring and Minecraft. In my free time, I have been developing a cooperative TTRPG-inspired roguelite with the working title Dungeon Crawl.
I am also a recipient of the Goodnight Scholarship, where I serve as a peer mentor and tutor for new transfer students.
I am always seeking opportunities to work on developing technologies in the robotics space. If you are interested in me or my work, please feel free to reach out.
Undergraduate Researcher
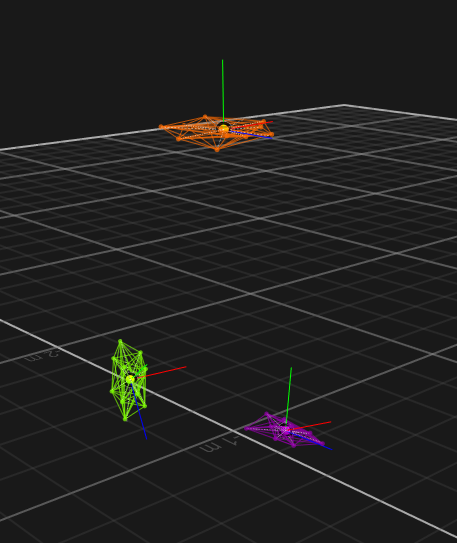
- Developed a Python teleoperation system for the Unitree Go2 quadrupedal robot, processing real-time motion capture data from a 6-camera OptiTrack system at 240Hz
- Designed a Temporal Convolutional Neural Network, achieving 95.46% accuracy in classifying 8 human gait modes from 34 biomechanical features derived from motion capture data
- Implemented causal TCN architecture with dilated convolutions and attention mechanisms, outperforming baseline CNN models by 6% for real-time gait classification
Webmaster and Technical Committee Lead
- Designed and maintained the ACM chapter website
- Led the Technical Committee in organizing and executing collaborative coding projects
- Organized technical talks and hands-on coding workshops

Peer Mentor and Computer Science Tutor
- Mentored transfer students through academic transition via one-on-one meetings and resource guides covering course selection, campus navigation, and social integration
- Provided peer tutoring in upper-level CS courses, including Software Development, Operating Systems, Algorithms, and Computational Theory
My research focuses on developing autonomous robots capable of operating safely and effectively in complex, human-centered environments. I'm particularly interested in enabling robots to assist with daily tasks currently inaccessible to many people. Applications of these Robots include helping older adults with household chores, assisting disaster relief personnel in dangerous environments, or maintaining the health of crops for busy farmers. The common thread among these types of robots is that they must perceive and reason about dynamic environments while safely navigating around humans.
My current work explores translating human motion capture data to quadrupedal robots using deep learning-based motion retargeting. This project enables human teleoperators to intuitively control quadrupeds and leverage these robots' superior stability and adaptability. This research has applications in controlling quadrupeds in hazardous or inaccessible environments, such as disaster zones or industrial sites, where human-level intelligence is necessary but humans and humanoid robots cannot safely operate.
Fetch-MC
GaitCNN

Gaggle